Query types and functions. More...
Data Structures | |
| struct | b3QueryFilter |
| The query filter is used to filter collisions between queries and shapes. More... | |
| struct | b3RayCastInput |
| Low level ray cast input data. More... | |
| struct | b3RayResult |
| Result from b3World_RayCastClosest. More... | |
| struct | b3ShapeProxy |
| A shape proxy is used by the GJK algorithm. It can represent a convex shape. More... | |
| struct | b3ShapeCastInput |
| Low level shape cast input in generic form. More... | |
| struct | b3BoxCastInput |
| Input for sweeping an AABB through a dynamic tree. More... | |
| struct | b3CastOutput |
| Low level ray cast or shape-cast output data. More... | |
| struct | b3BodyCastResult |
| Body cast result for ray and shape casts. More... | |
| struct | b3SimplexCache |
| Used to warm start the GJK simplex. More... | |
| struct | b3ShapeCastPairInput |
| Input parameters for b3ShapeCast. More... | |
| struct | b3DistanceInput |
| Input for b3ShapeDistance. More... | |
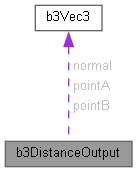
| struct | b3DistanceOutput |
| Output for b3ShapeDistance. More... | |
| struct | b3SimplexVertex |
| Simplex vertex for debugging the GJK algorithm. More... | |
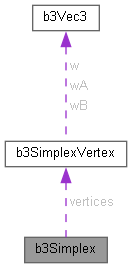
| struct | b3Simplex |
| Simplex from the GJK algorithm. More... | |
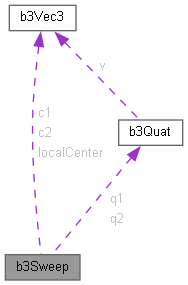
| struct | b3Sweep |
| This describes the motion of a body/shape for TOI computation. More... | |
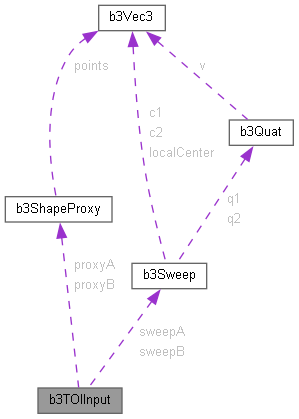
| struct | b3TOIInput |
| Time of impact input. More... | |
| struct | b3TOIOutput |
| Time of impact output. More... | |
Typedefs | |
| typedef bool | b3MeshQueryFcn(b3Vec3 a, b3Vec3 b, b3Vec3 c, int triangleIndex, void *context) |
| Query callback. | |
| typedef b3CastOutput | b3WorldCastOutput |
| Same type in single precision. | |
Enumerations | |
| enum | b3TOIState { b3_toiStateUnknown , b3_toiStateFailed , b3_toiStateOverlapped , b3_toiStateHit , b3_toiStateSeparated } |
| Describes the TOI output. | |
Functions | |
| bool | b3IsValidRay (const b3RayCastInput *input) |
| Use this to ensure your ray cast input is valid and avoid internal assertions. | |
| bool | b3OverlapCapsule (const b3Capsule *shape, b3Transform shapeTransform, const b3ShapeProxy *proxy) |
| Overlap shape versus capsule. | |
| bool | b3OverlapCompound (const b3CompoundData *shape, b3Transform shapeTransform, const b3ShapeProxy *proxy) |
| Overlap shape versus compound. | |
| bool | b3OverlapHeightField (const b3HeightFieldData *shape, b3Transform shapeTransform, const b3ShapeProxy *proxy) |
| Overlap shape versus height field. | |
| bool | b3OverlapHull (const b3HullData *shape, b3Transform shapeTransform, const b3ShapeProxy *proxy) |
| Overlap shape versus hull. | |
| bool | b3OverlapMesh (const b3Mesh *shape, b3Transform shapeTransform, const b3ShapeProxy *proxy) |
| Overlap shape versus mesh. | |
| bool | b3OverlapSphere (const b3Sphere *shape, b3Transform shapeTransform, const b3ShapeProxy *proxy) |
| Overlap shape versus sphere. | |
| b3CastOutput | b3RayCastSphere (const b3Sphere *shape, const b3RayCastInput *input) |
| Ray cast versus sphere in local space. | |
| b3CastOutput | b3RayCastHollowSphere (const b3Sphere *shape, const b3RayCastInput *input) |
| Ray cast versus a hollow sphere shell in local space. | |
| b3CastOutput | b3RayCastCapsule (const b3Capsule *shape, const b3RayCastInput *input) |
| Ray cast versus capsule in local space. | |
| b3CastOutput | b3RayCastCompound (const b3CompoundData *shape, const b3RayCastInput *input) |
| Ray cast versus compound in local space. | |
| b3CastOutput | b3RayCastHull (const b3HullData *shape, const b3RayCastInput *input) |
| Ray cast versus hull shape in local space. | |
| b3CastOutput | b3RayCastMesh (const b3Mesh *shape, const b3RayCastInput *input) |
| Ray cast versus mesh in local space. A thin surface with no interior, so there is no overlap case. | |
| b3CastOutput | b3RayCastHeightField (const b3HeightFieldData *shape, const b3RayCastInput *input) |
| Ray cast versus height field in local space. A thin surface with no interior, so there is no overlap case. | |
| b3CastOutput | b3ShapeCastSphere (const b3Sphere *shape, const b3ShapeCastInput *input) |
| Shape cast versus a sphere. Initial overlap is treated as a miss. | |
| b3CastOutput | b3ShapeCastCapsule (const b3Capsule *shape, const b3ShapeCastInput *input) |
| Shape cast versus a capsule. Initial overlap is treated as a miss. | |
| b3CastOutput | b3ShapeCastCompound (const b3CompoundData *shape, const b3ShapeCastInput *input) |
| Shape cast versus compound. Initial overlap is treated as a miss. | |
| b3CastOutput | b3ShapeCastHull (const b3HullData *shape, const b3ShapeCastInput *input) |
| Shape cast versus a hull. Initial overlap is treated as a miss. | |
| b3CastOutput | b3ShapeCastMesh (const b3Mesh *shape, const b3ShapeCastInput *input) |
| Shape cast versus a mesh. Initial overlap is treated as a miss. | |
| b3CastOutput | b3ShapeCastHeightField (const b3HeightFieldData *shape, const b3ShapeCastInput *input) |
| Shape cast versus a height field. Initial overlap is treated as a miss. | |
| void | b3QueryMesh (const b3Mesh *mesh, const b3AABB bounds, b3MeshQueryFcn *fcn, void *context) |
| Query a mesh for triangles overlapping a bounding box in local space. | |
| void | b3QueryHeightField (const b3HeightFieldData *heightField, b3AABB bounds, b3MeshQueryFcn *fcn, void *context) |
| Query a height field for triangles overlapping a bounding box in local space. | |
| b3DistanceOutput | b3ShapeDistance (const b3DistanceInput *input, b3SimplexCache *cache, b3Simplex *simplexes, int simplexCapacity) |
| Compute the closest points between two shapes represented as point clouds. | |
| b3CastOutput | b3ShapeCast (const b3ShapeCastPairInput *input) |
| Perform a linear shape cast of shape B moving and shape A fixed. | |
| b3Transform | b3GetSweepTransform (const b3Sweep *sweep, float time) |
| Evaluate the transform sweep at a specific time. | |
| b3TOIOutput | b3TimeOfImpact (const b3TOIInput *input) |
| Compute the upper bound on time before two shapes penetrate. | |
| b3QueryFilter | b3DefaultQueryFilter (void) |
| Use this to initialize your query filter. | |
Query types and functions.
Queries include ray casts, shapes casts, overlap, distance, and time of impact.
| struct b3QueryFilter |
The query filter is used to filter collisions between queries and shapes.
For example, you may want a ray-cast representing a projectile to hit players and the static environment but not debris.
| Data Fields | ||
|---|---|---|
| uint64_t | categoryBits | The collision category bits of this query. Normally you would just set one bit. |
| uint64_t | id |
Optional id combined with name to identify this query in a recording, e.g. an entity id. Need not be unique on its own. 0 with a null name means untagged. Ignored when not recording. |
| uint64_t | maskBits |
The collision mask bits. This states the shape categories that this query would accept for collision. |
| const char * | name |
Optional label combined with Ids to identify this query, e.g. "bullet". Need not be unique on its own. The recorder hashes (id, name) into one stable key the viewer tracks the query by, so the same id and name pair identifies the same query across frames. NULL means none. Ignored when not recording. |
| struct b3RayCastInput |
| struct b3RayResult |
Result from b3World_RayCastClosest.
| Data Fields | ||
|---|---|---|
| int | childIndex | The child index if the shape is a compound. |
| float | fraction | The fraction of the input ray. |
| bool | hit | Did the ray hit? If false, all other data is invalid. |
| int | leafVisits | The number of BVH leaves visited. Diagnostic. |
| int | nodeVisits | The number of BVH nodes visited. Diagnostic. |
| b3Vec3 | normal | The world normal of the shape surface at the hit point. |
| b3Pos | point | The world point of the hit. |
| b3ShapeId | shapeId | The shape hit. |
| int | triangleIndex | The triangle index if the shape is a mesh, height-field, or compound with child mesh. |
| uint64_t | userMaterialId |
The user material id at the hit point. This can be per triangle if the shape is a mesh, height-field, or compound with child mesh. |
| struct b3ShapeProxy |
A shape proxy is used by the GJK algorithm. It can represent a convex shape.
| Data Fields | ||
|---|---|---|
| int | count | The number of points. Do not exceed B3_MAX_SHAPE_CAST_POINTS. |
| const b3Vec3 * | points | The point cloud. |
| float | radius | The external radius of the point cloud. |
| struct b3ShapeCastInput |
Low level shape cast input in generic form.
This allows casting an arbitrary point cloud wrap with a radius. For example, a sphere is a single point with a non-zero radius. A capsule is two points with a non-zero radius. A box is four points with a zero radius.
| Data Fields | ||
|---|---|---|
| bool | canEncroach | Allow shape cast to encroach when initially touching. This only works if the radius is greater than zero. |
| float | maxFraction | The maximum fraction of the translation to consider, typically 1. |
| b3ShapeProxy | proxy | A generic query shape. |
| b3Vec3 | translation | The translation of the shape cast. |
| struct b3BoxCastInput |
Input for sweeping an AABB through a dynamic tree.
The box is in the tree's world float frame. The caller folds the cast shape radius and any world origin into the box, so the tree traversal stays a conservative box sweep and the precise narrow phase happens per shape in the callback.
| Data Fields | ||
|---|---|---|
| b3AABB | box | The AABB to cast, in the tree's frame. |
| float | maxFraction | The maximum fraction of the translation to consider, typically 1. |
| b3Vec3 | translation | The sweep translation. |
| struct b3CastOutput |
Low level ray cast or shape-cast output data.
| Data Fields | ||
|---|---|---|
| int | childIndex | The index of the compound child shape. |
| float | fraction | The fraction of the input translation at collision. |
| bool | hit | Did the cast hit? |
| int | iterations | The number of iterations used. |
| int | materialIndex | The material index. May be -1 for null. |
| b3Vec3 | normal | The surface normal at the hit point. |
| b3Vec3 | point | The surface hit point. |
| int | triangleIndex | The index of the mesh or height field triangle hit. |
| struct b3BodyCastResult |
Body cast result for ray and shape casts.
| Data Fields | ||
|---|---|---|
| float | fraction |
The fraction along the ray hit. hit point = origin + fraction * translation |
| bool | hit | Did the cast hit? If false, all other fields are invalid. |
| int | iterations | The number of iterations used. Diagnostic. |
| b3Vec3 | normal | The world normal vector on the shape surface. |
| b3Pos | point | The world point on the shape surface. |
| b3ShapeId | shapeId | The shape hit. |
| int | triangleIndex | The triangle index if the shape is a mesh or height-field. |
| uint64_t | userMaterialId |
The user material id at the hit point. This can be per triangle if the shape is a mesh, height-field, or compound with child mesh. |
| struct b3SimplexCache |
Used to warm start the GJK simplex.
If you call this function multiple times with nearby transforms this might improve performance. Otherwise you can zero initialize this. The distance cache must be initialized to zero on the first call. Users should generally just zero initialize this structure for each call.
| struct b3ShapeCastPairInput |
Input parameters for b3ShapeCast.
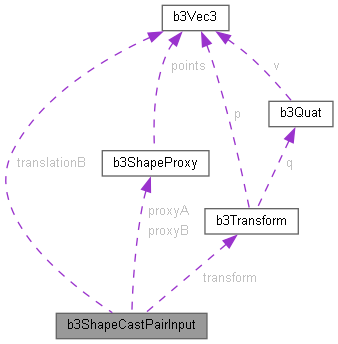
| Data Fields | ||
|---|---|---|
| bool | canEncroach | Allows shapes with a radius to move slightly closer if already touching. |
| float | maxFraction | The fraction of the translation to consider, typically 1. |
| b3ShapeProxy | proxyA | The proxy for shape A. |
| b3ShapeProxy | proxyB | The proxy for shape B. |
| b3Transform | transform | Transform of shape B in shape A's frame, the relative pose B in A. |
| b3Vec3 | translationB | The translation of shape B, in A's frame. |
| struct b3DistanceInput |
Input for b3ShapeDistance.
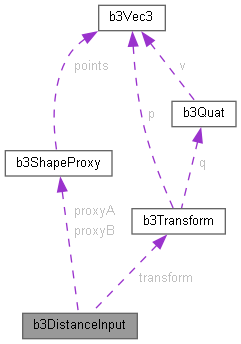
| Data Fields | ||
|---|---|---|
| b3ShapeProxy | proxyA | The proxy for shape A. |
| b3ShapeProxy | proxyB | The proxy for shape B. |
| b3Transform | transform |
Transform of shape B in shape A's frame, the relative pose B in A (b3InvMulWorldTransforms( worldA, worldB )). The query is origin independent and runs in frame A. |
| bool | useRadii | Should the proxy radius be considered? |
| struct b3DistanceOutput |
Output for b3ShapeDistance.
| Data Fields | ||
|---|---|---|
| float | distance | The final distance, zero if overlapped. |
| int | iterations | Number of GJK iterations used. |
| b3Vec3 | normal | A to B normal in shape A's frame. Invalid if distance is zero. |
| b3Vec3 | pointA | Closest point on shapeA, in shape A's frame. |
| b3Vec3 | pointB | Closest point on shapeB, in shape A's frame. |
| int | simplexCount | The number of simplexes stored in the simplex array. |
| struct b3SimplexVertex |
| struct b3Simplex |
Simplex from the GJK algorithm.
| Data Fields | ||
|---|---|---|
| int | count | number of valid vertices |
| b3SimplexVertex | vertices[4] | vertices |
| struct b3Sweep |
This describes the motion of a body/shape for TOI computation.
Shapes are defined with respect to the body origin, which may not coincide with the center of mass. However, to support dynamics we must interpolate the center of mass position.
| Data Fields | ||
|---|---|---|
| b3Vec3 | c1 | Starting center of mass world position. |
| b3Vec3 | c2 | Ending center of mass world position. |
| b3Vec3 | localCenter | Local center of mass position. |
| b3Quat | q1 | Starting world rotation. |
| b3Quat | q2 | Ending world rotation. |
| struct b3TOIInput |
Time of impact input.
| Data Fields | ||
|---|---|---|
| float | maxFraction | Defines the sweep interval [0, tMax]. |
| b3ShapeProxy | proxyA | The proxy for shape A. |
| b3ShapeProxy | proxyB | The proxy for shape B. |
| b3Sweep | sweepA | The movement of shape A. |
| b3Sweep | sweepB | The movement of shape B. |
| struct b3TOIOutput |
Time of impact output.
| Data Fields | ||
|---|---|---|
| float | distance | The final distance. |
| int | distanceIterations | Number of outer iterations. |
| float | fraction | The sweep time of the collision. |
| b3Vec3 | normal | The hit normal. |
| b3Vec3 | point | The hit point. |
| int | pushBackIterations | Total number of push back iterations. |
| int | rootIterations | Total number of root iterations. |
| b3TOIState | state | The type of result. |
| bool | usedFallback | Indicates that the time of impact detected initial overlap and used a fallback sphere as a last ditch effort to prevent tunneling. |
| void b3QueryHeightField | ( | const b3HeightFieldData * | heightField, |
| b3AABB | bounds, | ||
| b3MeshQueryFcn * | fcn, | ||
| void * | context ) |
Query a height field for triangles overlapping a bounding box in local space.
May have false positives. Useful for debug draw.
| heightField | the height field to query |
| bounds | the bounding box in local space |
| fcn | a user function to collect triangles |
| context | the context sent to the user function. |
| void b3QueryMesh | ( | const b3Mesh * | mesh, |
| const b3AABB | bounds, | ||
| b3MeshQueryFcn * | fcn, | ||
| void * | context ) |
Query a mesh for triangles overlapping a bounding box in local space.
May have false positives. Useful for debug draw.
| mesh | the mesh to query, includes scale |
| bounds | the bounding box in local space |
| fcn | a user function to collect triangles |
| context | the context sent to the user function. |
| b3CastOutput b3RayCastCapsule | ( | const b3Capsule * | shape, |
| const b3RayCastInput * | input ) |
Ray cast versus capsule in local space.
A zero length ray is a point query. Initial overlap reports a hit at the ray origin with zero fraction and zero normal.
| b3CastOutput b3RayCastCompound | ( | const b3CompoundData * | shape, |
| const b3RayCastInput * | input ) |
Ray cast versus compound in local space.
A zero length ray is a point query. Initial overlap with a child reports a hit at the ray origin with zero fraction and zero normal.
| b3CastOutput b3RayCastHollowSphere | ( | const b3Sphere * | shape, |
| const b3RayCastInput * | input ) |
Ray cast versus a hollow sphere shell in local space.
Unlike the solid sphere a ray starting inside is not an overlap: it passes through and hits the far wall.
| b3CastOutput b3RayCastHull | ( | const b3HullData * | shape, |
| const b3RayCastInput * | input ) |
Ray cast versus hull shape in local space.
A zero length ray is a point query. Initial overlap reports a hit at the ray origin with zero fraction and zero normal.
| b3CastOutput b3RayCastSphere | ( | const b3Sphere * | shape, |
| const b3RayCastInput * | input ) |
Ray cast versus sphere in local space.
A zero length ray is a point query. Initial overlap reports a hit at the ray origin with zero fraction and zero normal.
| b3CastOutput b3ShapeCast | ( | const b3ShapeCastPairInput * | input | ) |
Perform a linear shape cast of shape B moving and shape A fixed.
Determines the hit point, normal, and translation fraction. The query runs in frame A, so the hit point and normal are returned in frame A. Initially touching shapes are a miss.
| b3DistanceOutput b3ShapeDistance | ( | const b3DistanceInput * | input, |
| b3SimplexCache * | cache, | ||
| b3Simplex * | simplexes, | ||
| int | simplexCapacity ) |
Compute the closest points between two shapes represented as point clouds.
b3SimplexCache cache is input/output. On the first call set b3SimplexCache.count to zero. The query runs in frame A, so the witness points and normal are returned in frame A. The underlying GJK algorithm may be debugged by passing in debug simplexes and capacity. You may pass in NULL and 0 for these.
| b3TOIOutput b3TimeOfImpact | ( | const b3TOIInput * | input | ) |
Compute the upper bound on time before two shapes penetrate.
Time is represented as a fraction between [0,tMax]. This uses a swept separating axis and may miss some intermediate, non-tunneling collisions. If you change the time interval, you should call this function again.