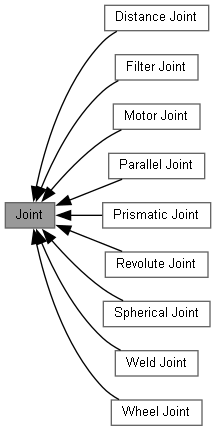
Joints allow you to connect rigid bodies together while allowing various forms of relative motions. More...
Topics | |
| Parallel Joint | |
| Functions for the parallel joint. | |
| Distance Joint | |
| Functions for the distance joint. | |
| Motor Joint | |
| Functions for the motor joint. | |
| Filter Joint | |
| Functions for the filter joint. | |
| Prismatic Joint | |
| A prismatic joint allows for translation along a single axis with no rotation. | |
| Revolute Joint | |
| A revolute joint allows for relative rotation about a single axis with no relative translation. | |
| Spherical Joint | |
| A spherical joint allows for relative rotation in the 3D space with no relative translation. | |
| Weld Joint | |
| A weld joint fully constrains the relative transform between two bodies while allowing for springiness. | |
| Wheel Joint | |
| The wheel joint can be used to simulate wheels on vehicles. | |
Data Structures | |
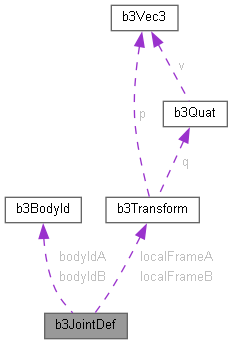
| struct | b3JointDef |
| Base joint definition used by all joint types. More... | |
Enumerations | |
| enum | b3JointType { b3_parallelJoint , b3_distanceJoint , b3_filterJoint , b3_motorJoint , b3_prismaticJoint , b3_revoluteJoint , b3_sphericalJoint , b3_weldJoint , b3_wheelJoint } |
| Joint type enumeration. More... | |
Functions | |
| void | b3DestroyJoint (b3JointId jointId, bool wakeAttached) |
| Destroy a joint. | |
| bool | b3Joint_IsValid (b3JointId id) |
| Joint identifier validation. Provides validation for up to 64K allocations. | |
| b3JointType | b3Joint_GetType (b3JointId jointId) |
| Get the joint type. | |
| b3BodyId | b3Joint_GetBodyA (b3JointId jointId) |
| Get body A id on a joint. | |
| b3BodyId | b3Joint_GetBodyB (b3JointId jointId) |
| Get body B id on a joint. | |
| b3WorldId | b3Joint_GetWorld (b3JointId jointId) |
| Get the world that owns this joint. | |
| void | b3Joint_SetLocalFrameA (b3JointId jointId, b3Transform localFrame) |
| Set the local frame on bodyA. | |
| b3Transform | b3Joint_GetLocalFrameA (b3JointId jointId) |
| Get the local frame on bodyA. | |
| void | b3Joint_SetLocalFrameB (b3JointId jointId, b3Transform localFrame) |
| Set the local frame on bodyB. | |
| b3Transform | b3Joint_GetLocalFrameB (b3JointId jointId) |
| Get the local frame on bodyB. | |
| void | b3Joint_SetCollideConnected (b3JointId jointId, bool shouldCollide) |
| Toggle collision between connected bodies. | |
| bool | b3Joint_GetCollideConnected (b3JointId jointId) |
| Is collision allowed between connected bodies? | |
| void | b3Joint_SetUserData (b3JointId jointId, void *userData) |
| Set the user data on a joint. | |
| void * | b3Joint_GetUserData (b3JointId jointId) |
| Get the user data on a joint. | |
| void | b3Joint_WakeBodies (b3JointId jointId) |
| Wake the bodies connect to this joint. | |
| b3Vec3 | b3Joint_GetConstraintForce (b3JointId jointId) |
| Get the current constraint force for this joint. | |
| b3Vec3 | b3Joint_GetConstraintTorque (b3JointId jointId) |
| Get the current constraint torque for this joint. | |
| float | b3Joint_GetLinearSeparation (b3JointId jointId) |
| Get the current linear separation error for this joint. Does not consider admissible movement. Usually in meters. | |
| float | b3Joint_GetAngularSeparation (b3JointId jointId) |
| Get the current angular separation error for this joint. Does not consider admissible movement. Usually in radians. | |
| void | b3Joint_SetConstraintTuning (b3JointId jointId, float hertz, float dampingRatio) |
| Set the joint constraint tuning. | |
| void | b3Joint_GetConstraintTuning (b3JointId jointId, float *hertz, float *dampingRatio) |
| Get the joint constraint tuning. Advanced feature. | |
| void | b3Joint_SetForceThreshold (b3JointId jointId, float threshold) |
| Set the force threshold for joint events (Newtons). | |
| float | b3Joint_GetForceThreshold (b3JointId jointId) |
| Get the force threshold for joint events (Newtons). | |
| void | b3Joint_SetTorqueThreshold (b3JointId jointId, float threshold) |
| Set the torque threshold for joint events (N-m). | |
| float | b3Joint_GetTorqueThreshold (b3JointId jointId) |
| Get the torque threshold for joint events (N-m). | |
Joints allow you to connect rigid bodies together while allowing various forms of relative motions.
| struct b3JointDef |
Base joint definition used by all joint types.
The local frames are measured from the body's origin rather than the center of mass because:
| Data Fields | ||
|---|---|---|
| b3BodyId | bodyIdA | The first attached body. |
| b3BodyId | bodyIdB | The second attached body. |
| bool | collideConnected | Set this flag to true if the attached bodies should collide. |
| float | constraintDampingRatio | Constraint damping ratio (advanced feature). |
| float | constraintHertz | Constraint hertz (advanced feature). |
| float | drawScale | Debug draw scale. |
| float | forceThreshold | Force threshold for joint events. |
| int | internalValue | Used internally to detect a valid definition. DO NOT SET. |
| b3Transform | localFrameA | The first local joint frame. |
| b3Transform | localFrameB | The second local joint frame. |
| float | torqueThreshold | Torque threshold for joint events. |
| void * | userData | User data pointer. |
| enum b3JointType |
Joint type enumeration.
This is useful because all joint types use b3JointId and sometimes you want to get the type of a joint.
| void b3Joint_SetConstraintTuning | ( | b3JointId | jointId, |
| float | hertz, | ||
| float | dampingRatio ) |
Set the joint constraint tuning.
Advanced feature.
| jointId | the joint |
| hertz | the stiffness in Hertz (cycles per second) |
| dampingRatio | the non-dimensional damping ratio (one for critical damping) |