Collide pairs of shapes. More...
Data Structures | |
| struct | b3ManifoldPoint |
| A manifold point is a contact point belonging to a contact manifold. More... | |
| struct | b3Manifold |
| A contact manifold describes the contact points between colliding shapes. More... | |
| struct | b3SATCache |
| Separating axis test cache. Provides temporal acceleration of collision routines. More... | |
| struct | b3FeaturePair |
| Contact points are always the result of two edges intersecting. More... | |
| struct | b3LocalManifoldPoint |
| A local manifold point and normal in frame A. More... | |
| struct | b3LocalManifold |
| A local manifold with no dynamic information. Used by b3Collide functions. More... | |
Enumerations | |
| enum | b3SeparatingFeature { b3_invalidAxis = 0 , b3_backsideAxis , b3_faceAxisA , b3_faceAxisB , b3_edgePairAxis , b3_closestPointsAxis , b3_manualFaceAxisA , b3_manualFaceAxisB , b3_manualEdgePairAxis } |
| Cached separating axis feature. More... | |
| enum | b3TriangleFeature { b3_featureNone = 0 , b3_featureTriangleFace , b3_featureHullFace , b3_featureEdge1 , b3_featureEdge2 , b3_featureEdge3 , b3_featureVertex1 , b3_featureVertex2 , b3_featureVertex3 } |
| Cached triangle feature. More... | |
Functions | |
| void | b3CollideSpheres (b3LocalManifold *manifold, int capacity, const b3Sphere *sphereA, const b3Sphere *sphereB, b3Transform transformBtoA) |
| Collide two spheres. | |
| void | b3CollideCapsuleAndSphere (b3LocalManifold *manifold, int capacity, const b3Capsule *capsuleA, const b3Sphere *sphereB, b3Transform transformBtoA) |
| Collide a capsule and a sphere. | |
| void | b3CollideHullAndSphere (b3LocalManifold *manifold, int capacity, const b3HullData *hullA, const b3Sphere *sphereB, b3Transform transformBtoA, b3SimplexCache *cache) |
| Collide a hull and a sphere. | |
| void | b3CollideCapsules (b3LocalManifold *manifold, int capacity, const b3Capsule *capsuleA, const b3Capsule *capsuleB, b3Transform transformBtoA) |
| Collide two capsules. | |
| void | b3CollideHullAndCapsule (b3LocalManifold *manifold, int capacity, const b3HullData *hullA, const b3Capsule *capsuleB, b3Transform transformBtoA, b3SimplexCache *cache) |
| Collide a hull and a capsule. | |
| void | b3CollideHulls (b3LocalManifold *manifold, int capacity, const b3HullData *hullA, const b3HullData *hullB, b3Transform transformBtoA, b3SATCache *cache) |
| Collide two hulls. | |
| void | b3CollideCapsuleAndTriangle (b3LocalManifold *manifold, int capacity, const b3Capsule *capsuleA, const b3Vec3 *triangleB, b3SimplexCache *cache) |
| Collide a capsule and a triangle. | |
| void | b3CollideHullAndTriangle (b3LocalManifold *manifold, int capacity, const b3HullData *hullA, b3Vec3 v1, b3Vec3 v2, b3Vec3 v3, int triangleFlags, b3SATCache *cache) |
| Collide a hull and a triangle. | |
| void | b3CollideSphereAndTriangle (b3LocalManifold *manifold, int capacity, const b3Sphere *sphereA, const b3Vec3 *triangleB) |
| Collide a sphere and a triangle. | |
Collide pairs of shapes.
| struct b3ManifoldPoint |
A manifold point is a contact point belonging to a contact manifold.
It holds details related to the geometry and dynamics of the contact points. Box3D uses speculative collision so some contact points may be separated. You may use the maxNormalImpulse to determine if there was an interaction during the time step.
| Data Fields | ||
|---|---|---|
| b3Vec3 | anchorA | Location of the contact point relative to the bodyA center of mass in world space. |
| b3Vec3 | anchorB | Location of the contact point relative to the bodyB center of mass in world space. |
| float | baseSeparation | Cached separation used for contact recycling. |
| uint32_t | featureId | Local point for matching Uniquely identifies a contact point between two shapes. |
| float | normalImpulse |
The impulse along the manifold normal vector. Since Box3D uses sub-stepping, this is result from the final sub-step. |
| float | normalVelocity |
Relative normal velocity pre-solve. Used for hit events. If the normal impulse is zero then there was no hit. Negative means shapes are approaching. |
| bool | persisted | Did this contact point exist in the previous step? |
| float | separation | The separation of the contact point, negative if penetrating. |
| float | totalNormalImpulse |
The total normal impulse applied during sub-stepping. This is important to identify speculative contact points that had an interaction in the time step. |
| int | triangleIndex | Triangle index if one of the shapes is a mesh or height field. |
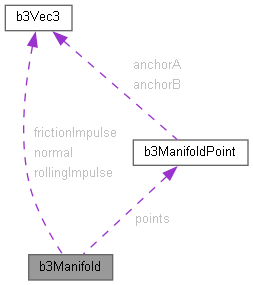
| struct b3Manifold |
A contact manifold describes the contact points between colliding shapes.
| Data Fields | ||
|---|---|---|
| b3Vec3 | frictionImpulse | Central friction linear impulse. |
| b3Vec3 | normal | The unit normal vector in world space, points from shape A to shape B. |
| int | pointCount | The number of contact points, will be 0 to 4. |
| b3ManifoldPoint | points[B3_MAX_MANIFOLD_POINTS] | The manifold points. There may be 1 to 4 valid points. |
| b3Vec3 | rollingImpulse | Rolling resistance angular impulse. |
| float | twistImpulse | Central friction angular impulse (applied about the normal). |
| struct b3SATCache |
Separating axis test cache. Provides temporal acceleration of collision routines.
| Data Fields | ||
|---|---|---|
| uint8_t | hit | Was the cache re-used? |
| uint8_t | indexA | Index of the feature on shape A. |
| uint8_t | indexB | Index of the feature on shape B. |
| float | separation | The separation when the cache is populated. Negative for overlap. |
| uint8_t | type | b3SeparatingFeature. |
| struct b3FeaturePair |
Contact points are always the result of two edges intersecting.
It can be two edges of the same shape, which is just a shape vertex. Or a contact point can be the result of two edges crossing from different shapes. This is designed to support hull versus hull, but it is adapted to work with all shape types. The feature pair is used to identify contact points for temporal coherence and warm starting.
| struct b3LocalManifoldPoint |
A local manifold point and normal in frame A.
| Data Fields | ||
|---|---|---|
| b3FeaturePair | pair | The feature pair for this point. |
| b3Vec3 | point | Local point in frame A. |
| float | separation | The contact point separation. Negative for overlap. |
| int | triangleIndex | The triangle index when collide with a mesh or height-field. |
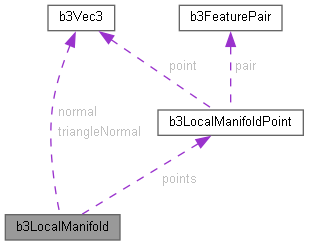
| struct b3LocalManifold |
A local manifold with no dynamic information. Used by b3Collide functions.
| Data Fields | ||
|---|---|---|
| b3TriangleFeature | feature | The triangle feature involved. |
| int | i1 | Vertex 1 index. |
| int | i2 | Vertex 2 index. |
| int | i3 | Vertex 3 index. |
| b3Vec3 | normal | Local normal in frame A. |
| int | pointCount | The number of manifold points. Only bounded by the buffer capacity. |
| b3LocalManifoldPoint * | points | The manifold points. From a point buffer. |
| float | squaredDistance | The squared distance of a sphere from a triangle. For ghost collision reduction. |
| int | triangleFlags | b3MeshEdgeFlags. |
| int | triangleIndex | The index of the triangle. |
| b3Vec3 | triangleNormal | The triangle normal. |
| enum b3SeparatingFeature |
| enum b3TriangleFeature |