World event types. More...
Data Structures | |
| struct | b3SensorBeginTouchEvent |
| A begin-touch event is generated when a shape starts to overlap a sensor shape. More... | |
| struct | b3SensorEndTouchEvent |
| An end touch event is generated when a shape stops overlapping a sensor shape. More... | |
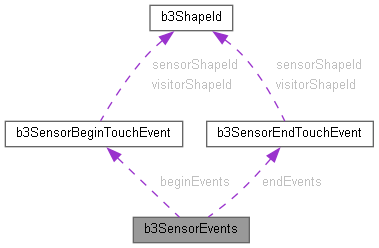
| struct | b3SensorEvents |
| Sensor events are buffered in the world and are available as begin/end overlap event arrays after the time step is complete. More... | |
| struct | b3ContactBeginTouchEvent |
| A begin-touch event is generated when two shapes begin touching. More... | |
| struct | b3ContactEndTouchEvent |
| An end touch event is generated when two shapes stop touching. More... | |
| struct | b3ContactHitEvent |
| A hit touch event is generated when two shapes collide with a speed faster than the hit speed threshold. More... | |
| struct | b3ContactEvents |
| Contact events are buffered in the world and are available as event arrays after the time step is complete. More... | |
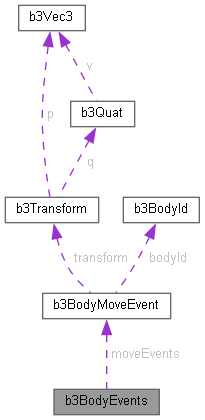
| struct | b3BodyMoveEvent |
| Body move events triggered when a body moves. More... | |
| struct | b3BodyEvents |
| Body events are buffered in the world and are available as event arrays after the time step is complete. More... | |
| struct | b3JointEvent |
| Joint events report joints that are awake and have a force and/or torque exceeding the threshold The observed forces and torques are not returned for efficiency reasons. More... | |
| struct | b3JointEvents |
| Joint events are buffered in the world and are available as event arrays after the time step is complete. More... | |
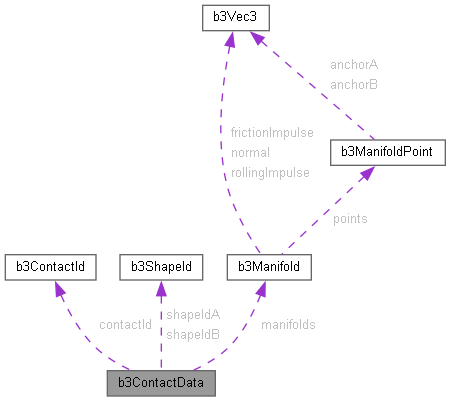
| struct | b3ContactData |
| The contact data for two shapes. More... | |
World event types.
Events are used to collect events that occur during the world time step. These events are then available to query after the time step is complete. This is preferable to callbacks because Box3D uses multithreaded simulation.
Also when events occur in the simulation step it may be problematic to modify the world, which is often what applications want to do when events occur.
With event arrays, you can scan the events in a loop and modify the world. However, you need to be careful that some event data may become invalid. There are several samples that show how to do this safely.
| struct b3SensorBeginTouchEvent |
| struct b3SensorEndTouchEvent |
An end touch event is generated when a shape stops overlapping a sensor shape.
These include things like setting the transform, destroying a body or shape, or changing a filter. You will also get an end event if the sensor or visitor are destroyed. Therefore you should always confirm the shape id is valid using b3Shape_IsValid.
| Data Fields | ||
|---|---|---|
| b3ShapeId | sensorShapeId |
The id of the sensor shape.
|
| b3ShapeId | visitorShapeId |
The id of the shape that stopped touching the sensor shape.
|
| struct b3SensorEvents |
Sensor events are buffered in the world and are available as begin/end overlap event arrays after the time step is complete.
Note: these may become invalid if bodies and/or shapes are destroyed
| Data Fields | ||
|---|---|---|
| int | beginCount | The number of begin touch events. |
| b3SensorBeginTouchEvent * | beginEvents | Array of sensor begin touch events. |
| int | endCount | The number of end touch events. |
| b3SensorEndTouchEvent * | endEvents | Array of sensor end touch events. |
| struct b3ContactBeginTouchEvent |
A begin-touch event is generated when two shapes begin touching.
| Data Fields | ||
|---|---|---|
| b3ContactId | contactId |
The transient contact id. This contact may be destroyed automatically when the world is modified or simulated. Use b3Contact_IsValid before using this id. |
| b3ShapeId | shapeIdA | Id of the first shape. |
| b3ShapeId | shapeIdB | Id of the second shape. |
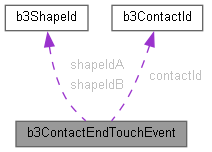
| struct b3ContactEndTouchEvent |
An end touch event is generated when two shapes stop touching.
You will get an end event if you do anything that destroys contacts previous to the last world step. These include things like setting the transform, destroying a body or shape, or changing a filter or body type.
| Data Fields | ||
|---|---|---|
| b3ContactId | contactId |
Id of the contact.
|
| b3ShapeId | shapeIdA |
Id of the first shape.
|
| b3ShapeId | shapeIdB |
Id of the first shape.
|
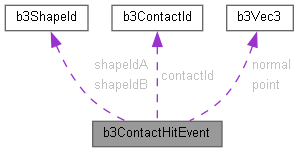
| struct b3ContactHitEvent |
A hit touch event is generated when two shapes collide with a speed faster than the hit speed threshold.
This may be reported for speculative contacts that have a confirmed impulse.
| Data Fields | ||
|---|---|---|
| float | approachSpeed | The speed the shapes are approaching. Always positive. Typically in meters per second. |
| b3ContactId | contactId |
Id of the contact.
|
| b3Vec3 | normal | Normal vector pointing from shape A to shape B. |
| b3Pos | point |
Point where the shapes hit at the beginning of the time step. This is a mid-point between the two surfaces. It could be at speculative point where the two shapes were not touching at the beginning of the time step. |
| b3ShapeId | shapeIdA | Id of the first shape. |
| b3ShapeId | shapeIdB | Id of the second shape. |
| uint64_t | userMaterialIdA | User material on shape A. |
| uint64_t | userMaterialIdB | User material on shape B. |
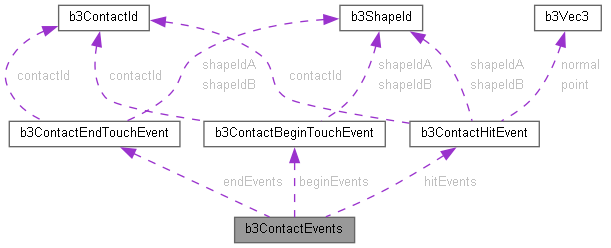
| struct b3ContactEvents |
Contact events are buffered in the world and are available as event arrays after the time step is complete.
Note: these may become invalid if bodies and/or shapes are destroyed
| Data Fields | ||
|---|---|---|
| int | beginCount | Number of begin touch events. |
| b3ContactBeginTouchEvent * | beginEvents | Array of begin touch events. |
| int | endCount | Number of end touch events. |
| b3ContactEndTouchEvent * | endEvents | Array of end touch events. |
| int | hitCount | Number of hit events. |
| b3ContactHitEvent * | hitEvents | Array of hit events. |
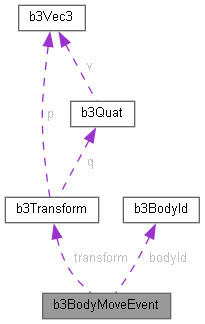
| struct b3BodyMoveEvent |
Body move events triggered when a body moves.
Triggered when a body moves due to simulation. Not reported for bodies moved by the user. This also has a flag to indicate that the body went to sleep so the application can also sleep that actor/entity/object associated with the body. On the other hand if the flag does not indicate the body went to sleep then the application can treat the actor/entity/object associated with the body as awake. This is an efficient way for an application to update game object transforms rather than calling functions such as b3Body_GetTransform() because this data is delivered as a contiguous array and it is only populated with bodies that have moved.
| Data Fields | ||
|---|---|---|
| b3BodyId | bodyId | The body id. |
| bool | fellAsleep | Did the body fall asleep this time step? |
| b3WorldTransform | transform | The body transform. |
| void * | userData | The body user data. |
| struct b3BodyEvents |
Body events are buffered in the world and are available as event arrays after the time step is complete.
Note: this data becomes invalid if bodies are destroyed
| Data Fields | ||
|---|---|---|
| int | moveCount | Number of move events. |
| b3BodyMoveEvent * | moveEvents | Array of move events. |
| struct b3JointEvent |
Joint events report joints that are awake and have a force and/or torque exceeding the threshold The observed forces and torques are not returned for efficiency reasons.
| Data Fields | ||
|---|---|---|
| b3JointId | jointId | The joint id. |
| void * | userData | The user data from the joint for convenience. |
| struct b3JointEvents |
Joint events are buffered in the world and are available as event arrays after the time step is complete.
Note: this data becomes invalid if joints are destroyed
| Data Fields | ||
|---|---|---|
| int | count | Number of events. |
| b3JointEvent * | jointEvents | Array of events. |
| struct b3ContactData |
The contact data for two shapes.
By convention the manifold normal points from shape A to shape B.
| Data Fields | ||
|---|---|---|
| b3ContactId | contactId |
The contact id. You may hold onto this to track a contact across time steps. This id may become orphaned. Use b3Contact_IsValid before using it for other functions. |
| int | manifoldCount | The number of contact manifolds. For mesh and height-field collision there can be multiple manifolds. |
| const struct b3Manifold * | manifolds |
The contact manifold. This points to internal data and may become invalid. Do not store this pointer. |
| b3ShapeId | shapeIdA | The first shape id. |
| b3ShapeId | shapeIdB | The second shape id. |